 Évènements
Évènements AIP
AIP ANPCEN
ANPCENQui est en ligne ?
Il y a en tout 3 utilisateurs en ligne :: 0 Enregistré, 0 Invisible et 3 Invités Aucun
Le record du nombre d'utilisateurs en ligne est de 325 le Lun 4 Nov 2019 - 23:38
Derniers sujets
Rechercher
Marque-page social



Conservez et partagez l'adresse de Astron'amis sur votre site de social bookmarking
Conservez et partagez l'adresse de Astron'amis sur votre site de social bookmarking
Appel aux dons

Système de moteur de mise au point fait maison
4 participants
Page 1 sur 1
![]()
 Système de moteur de mise au point fait maison
Système de moteur de mise au point fait maison
![]() par Le Glaude Sam 28 Jan 2012 - 11:05
par Le Glaude Sam 28 Jan 2012 - 11:05
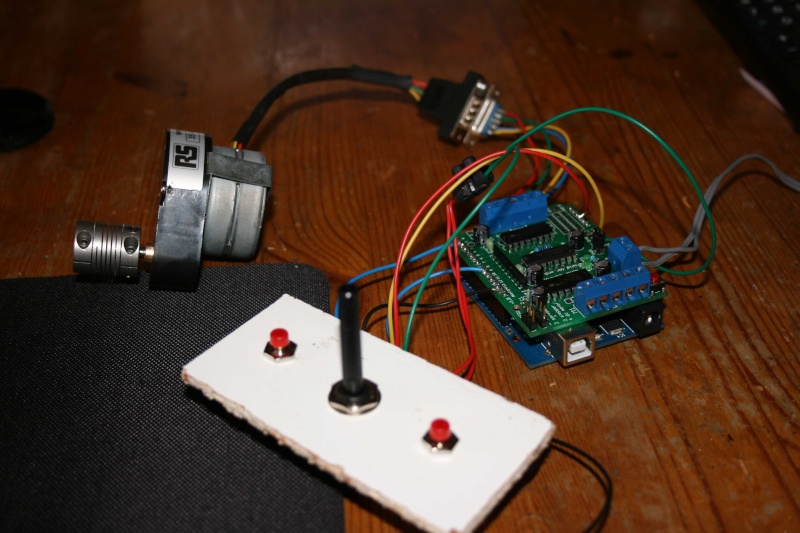
Il y a bien longtemps j'ai commencé à bricoler un système de moteur MAP pour ma FLT110, basé sur ce projet http://ejholmes.github.com/2010/03/28/the-arduino-focuser.html
cela fonctionnait pas trop mal. seul défaut, le logiciel consommait beaucoup de ressource du CPU. J'ai donc fait des recherches sur le net et j'ai trouvé cette page http://sites.google.com/site/arduinofocus/ ne voulant pas changé de carte interface, ce projet utilise l'Arduino (carte avec microcontroleur) + une carte Adafruit Stepper Shield (piloter le moteur pas à pas) que j'avais déjà. Le projet utilise le protocole Robofocus avec son logiciel écrit en visual basic 6 dont les sources sont disponibles. Cela fonctionne pas mal et les ressources du CPU sont épargnées. Ce projet est prévu avec un encodeur (qui ressemble à un potentiomètre que je n'ai pas) pour affiner la MAP par exemple sans utiliser l'ordinateur (en live-view par ex.) J'ai donc modifier le firmware (écrit en C que je ne maitrise pas du tout) pour greffer un potentiomètre qui règle le nombre de pas, et deux boutons poussoirs pour le mouvement du moteur. le projet du site me semble au point mort et je n'ai pas réussi à entrer en contact avec son créateur.
Pour le moment ça marche,( il reste à adapter la vitesse du moteur (firmware) ) mais je n'ai pas encore essayé sur la lunette. voici une photo du système (c'est provisoire je ne l'ai pas encore réinstallé dans le boitier)
cela fonctionnait pas trop mal. seul défaut, le logiciel consommait beaucoup de ressource du CPU. J'ai donc fait des recherches sur le net et j'ai trouvé cette page http://sites.google.com/site/arduinofocus/ ne voulant pas changé de carte interface, ce projet utilise l'Arduino (carte avec microcontroleur) + une carte Adafruit Stepper Shield (piloter le moteur pas à pas) que j'avais déjà. Le projet utilise le protocole Robofocus avec son logiciel écrit en visual basic 6 dont les sources sont disponibles. Cela fonctionne pas mal et les ressources du CPU sont épargnées. Ce projet est prévu avec un encodeur (qui ressemble à un potentiomètre que je n'ai pas) pour affiner la MAP par exemple sans utiliser l'ordinateur (en live-view par ex.) J'ai donc modifier le firmware (écrit en C que je ne maitrise pas du tout) pour greffer un potentiomètre qui règle le nombre de pas, et deux boutons poussoirs pour le mouvement du moteur. le projet du site me semble au point mort et je n'ai pas réussi à entrer en contact avec son créateur.
Pour le moment ça marche,( il reste à adapter la vitesse du moteur (firmware) ) mais je n'ai pas encore essayé sur la lunette. voici une photo du système (c'est provisoire je ne l'ai pas encore réinstallé dans le boitier)

Le Glaude- Club : Association Astronomique de l'Ain
Localisation : Ain
Humeur : Pas toujours très bavard -

![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Walcho Sam 28 Jan 2012 - 14:36
par Walcho Sam 28 Jan 2012 - 14:36
Pas mal du tout et intéressant ce bricolage.
Ça me fascine toujours ces bricolages électroniques car je n'y connais pas grand chose.
J'espère que tu arriveras à faire aboutir ton projet.
Ça me fascine toujours ces bricolages électroniques car je n'y connais pas grand chose.
J'espère que tu arriveras à faire aboutir ton projet.

Walcho- Club : Nemesis / AIP / F4A
Localisation : Schleithal
Humeur : Astronamicale -
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Franck M57 Mer 15 Fév 2012 - 21:53
par Franck M57 Mer 15 Fév 2012 - 21:53
Bonjour,
Ce serait possible d'obtenir la modification faite sur le fichier .pde, stp.
J'ai également contacté l'auteur du site http://sites.google.com/site/arduinofocus/, mais je n'ai pas recu de réponse.
Il y a plusieurs bugs mineurs.
- le duty cycle ne fonction pas. Le moteur est totalement libre à l'état de repos.
- la modification du backlash ne s'éffectue pas depuis le soft ascom robofocus
- l'envoi d'une commande lorsqu'une commande est encore en cours bloque le programme alors que le moteur devrait simplement stopper.
Merci
Franck
Ce serait possible d'obtenir la modification faite sur le fichier .pde, stp.
J'ai également contacté l'auteur du site http://sites.google.com/site/arduinofocus/, mais je n'ai pas recu de réponse.
Il y a plusieurs bugs mineurs.
- le duty cycle ne fonction pas. Le moteur est totalement libre à l'état de repos.
- la modification du backlash ne s'éffectue pas depuis le soft ascom robofocus
- l'envoi d'une commande lorsqu'une commande est encore en cours bloque le programme alors que le moteur devrait simplement stopper.
Merci
Franck

Franck M57
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Walcho Mer 15 Fév 2012 - 22:09
par Walcho Mer 15 Fév 2012 - 22:09
Salut Franck,
Bienvenue sur le Forum des amis de l'astronomie ... attention ... j'aperçois déjà des amis prêt à dégainer parce que tu n'es pas encore passé par la case des présentations!
Après on va se faire de fausses idées sur notre "amicalité" !
Nous on aime connaitre les nouveaux membres !
Bienvenue sur le Forum des amis de l'astronomie ... attention ... j'aperçois déjà des amis prêt à dégainer parce que tu n'es pas encore passé par la case des présentations!
Après on va se faire de fausses idées sur notre "amicalité" !
Nous on aime connaitre les nouveaux membres !
Walcho- Club : Nemesis / AIP / F4A
Localisation : Schleithal
Humeur : Astronamicale -
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Franck M57 Mer 15 Fév 2012 - 22:29
par Franck M57 Mer 15 Fév 2012 - 22:29
Ayé, c'est fait
Franck
Franck
Franck M57
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par MissBlues Mer 15 Fév 2012 - 22:35
par MissBlues Mer 15 Fév 2012 - 22:35
Salut Claude!
eh ben dis donc c'est intéressant tu vois bien qu'un certains ptit surnom te va comme un charme
en tout cas bravoo pour cette trouvaille!
eh ben dis donc c'est intéressant tu vois bien qu'un certains ptit surnom te va comme un charme
en tout cas bravoo pour cette trouvaille!

MissBlues- Club : Astron'amis
Localisation : Somewhere in the Milky Way. -
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Le Glaude Jeu 16 Fév 2012 - 16:14
par Le Glaude Jeu 16 Fév 2012 - 16:14
Salut FranckFranck M57 a écrit:Bonjour,
Ce serait possible d'obtenir la modification faite sur le fichier .pde, stp.
J'ai également contacté l'auteur du site http://sites.google.com/site/arduinofocus/, mais je n'ai pas recu de réponse.
Il y a plusieurs bugs mineurs.
- le duty cycle ne fonction pas. Le moteur est totalement libre à l'état de repos.
- la modification du backlash ne s'éffectue pas depuis le soft ascom robofocus
- l'envoi d'une commande lorsqu'une commande est encore en cours bloque le programme alors que le moteur devrait simplement stopper.
Merci
Franck
Moi non plus je n'ai pas eu de réponse.
Tu peux télécharger le fichier ici http://revermont.blog.free.fr/documents/ArduinoFocus_new.pde
Attention je n'y connais pas grand chose en programmation là c'est du C.
Le moteur est relâché par la commande motor.release();
il se peut qu'il chauffe sans cette commande.
en effet l'interface ascom ne prend pas certaines commande, si tu as des solutions je suis preneur
A+
Le Glaude- Club : Association Astronomique de l'Ain
Localisation : Ain
Humeur : Pas toujours très bavard -
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Franck M57 Jeu 16 Fév 2012 - 22:51
par Franck M57 Jeu 16 Fév 2012 - 22:51
Bonjour,
Merci. Je vais essayer.
Hélas, je ne connais pas grand chose dans la programmation de l'arduino.
Ici, un soft simple d'utilisation qui gère le protocole robofocus
http://www.astropix.it/software/astrorf.html
Franck
Merci. Je vais essayer.
Hélas, je ne connais pas grand chose dans la programmation de l'arduino.
Ici, un soft simple d'utilisation qui gère le protocole robofocus
http://www.astropix.it/software/astrorf.html
Franck
Franck M57
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Le Glaude Ven 17 Fév 2012 - 22:31
par Le Glaude Ven 17 Fév 2012 - 22:31
Je vais voir ça mais c'est en Italien !
Au fait c'est quoi le duty cycle ?
Ce qui est dommage c'est qu'en quittant le logiciel il ne se rappelle pas de la dernière position.
Au fait c'est quoi le duty cycle ?
Ce qui est dommage c'est qu'en quittant le logiciel il ne se rappelle pas de la dernière position.
Le Glaude- Club : Association Astronomique de l'Ain
Localisation : Ain
Humeur : Pas toujours très bavard -
![]()
![]()
Re: Système de moteur de mise au point fait maison
![]() par Franck M57 Ven 17 Fév 2012 - 23:59
par Franck M57 Ven 17 Fév 2012 - 23:59
La valeur donnée au duty cycle (0 à 100%) permet de conserver une certaine intensité dans les bobines du moteur lorsqu'il ne tourne pas (à l'état de repos).
Plus cette intensité est élevée, moins il est possible de modifier manuellemenet la rotation du moteur. C'est intéressant lorsque la CCD est lourde. L'inconvénient est que l'on consomme plus et que le moteur chauffe. Il faut trouver un compromis.
Franck
Plus cette intensité est élevée, moins il est possible de modifier manuellemenet la rotation du moteur. C'est intéressant lorsque la CCD est lourde. L'inconvénient est que l'on consomme plus et que le moteur chauffe. Il faut trouver un compromis.
Franck
Franck M57
![]()
![]()
![]()
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|
» [Résolu] Évolution progressive
» M51 500 f/8 + doubleur
» "Journées de l'astronomie de Saverne" les 13 et 14 Avril 2024
» Mosaique avec MaximDL
» recherche Mewlon 250 Takahashi CRS ou non
» FRA300 : deux nouveaux tests
» Test ASKAR FMA135
» M27 nébuleuse du trognon de pomme
» NGC6992 à la FRA300
» Du cousu main - ou presque
» Andromède, une histoire d'ZWO
» SOS d'un utilisateur de kstars en détresse
» Perséïdes 2023
» Bonjour à tous !
» Mon site web dédié à l'astrophoto
» Problème de raquette
» DEBUTER EN PHOTOMETRIE
» Vends Caméra QSI 640 WSG8
» Propus dans la brume
» "Journées de l'astronomie de Saverne" les 6 et 7 Mai 2023
» Mes débuts de réduction d'étoiles
» La comète Z'êtes Tous Fadas
» Eclipse oct. 2022
» Une portion de Soleil
» Grosse Protubérance
» FSQ106EDX4, robofocus et diviseur optique skymeca
» Oculaire Televue DELOS 10mm
» Reducteur de focale Takahashi 0.73X
» Monture neuve Vixen GP2 avec trepied